Flight Control is Key to Success
The most difficult thing about flying is to keep control of the aircraft at all times. For this you need either a capable pilot, or a powerful flight computer, which has the necessary sensors (IMU, GPS, lidar) to check and correct the flight attitude and position at any time. Ideally you have both.
The first flight tests with both the prototype and the full-scale FlyRider aircraft will be carried out remotely (for the prototype test flights there is no choice since its unmanned, for FlyRider ist just for safety reasons).
Pixhawk is a sophisticated flight controller, but only the hardware. Without suitable software it just can't work! Fortunately, there is a variety of software that can run on Pixhawk, my choice is "ArduPilot". ArduPilot is one of the most advanced and reliable open source autopilot software available, it has been under development since 2010. The software is capable of controlling almost any vehicle system imaginable, from conventional airplanes, multi-copters and helicopters to rovers, boats and even submarines.
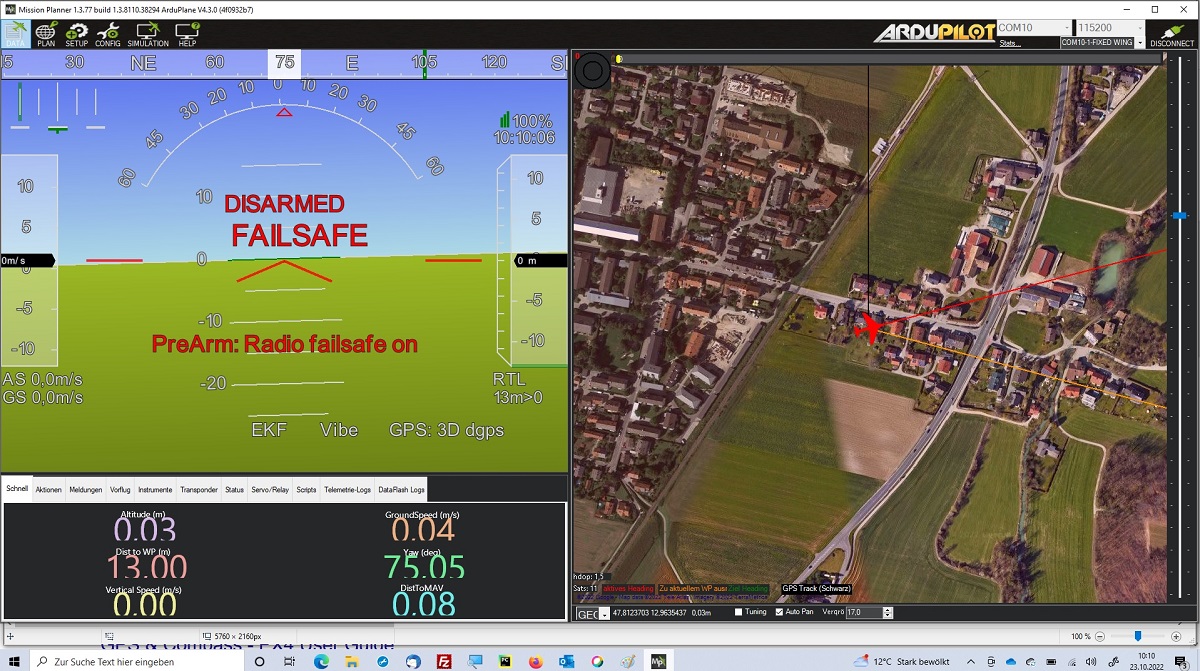
Mission Planer
Mission Planner (MP) is a full-featured ground station application for ArduPilot. Mission Planner can be used as a configuration
utility or as control supplement for ArduPilot controlled vehicles. With MP you can install the firmware into the flight-controller
hardware, setup and configuration your vehicle, plan autonomous missions with simple point-and-click way-point entry on maps,
download and evaluate mission logs created by autopilot and monitor the vehicle status while in operation.
Most importantly: All required settings for the flight controller can be made in Mission Planner.
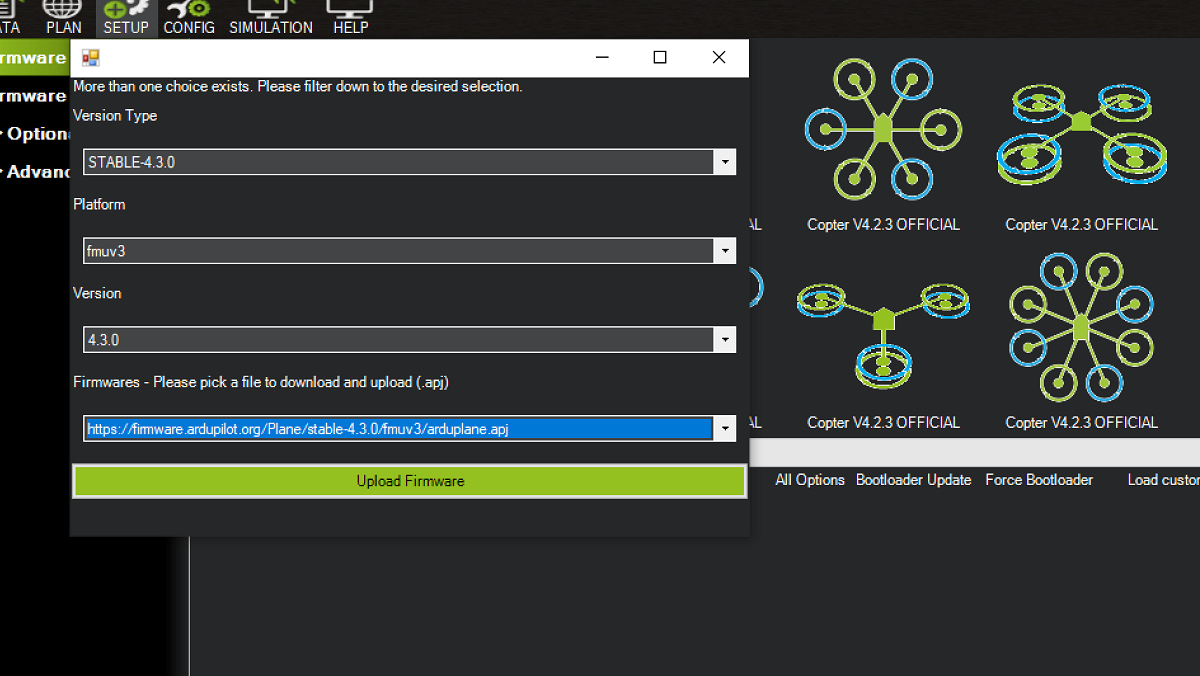
Flight Controller Setup
Make sure that you install the correct firmware on your flight controller hardware. The manufacturer strongly recommends to use only the firmware "FMUv3" with Pixhawk 2.4.8.
Requirements for Flight Control
The three most important aspects of Flyrider flight control are: Safety, safety and safety. Performance, range, acceleration and speed are irrelevant, it's all about safety.
For the flight phase, a sensible response should be defined for every possible failure situation. Possible problems are, for example, loss of the remote control signal, low battery voltage or, in extreme cases, motor failure.
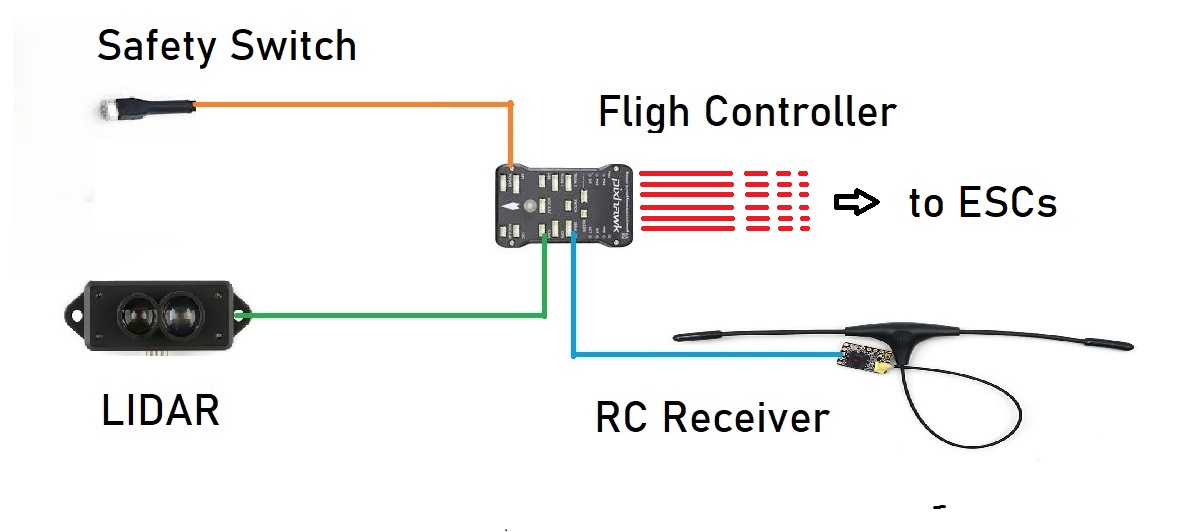
Normally, drones are operated with GPS and a compass, as autonomous flight operation is not planned with FlyRider, both are not used. The principle here is that an uninstalled part cannot fail. For safety reasons, the height above ground should be limited to 2 meters - this is checked with a laser rangefinder installed on the underside of the aircraft.
Requirements: - limiting the flight altitude to 2 meters above ground - limited forward speed (limited pitch angle) - speed backwards and sideways is limited to almost zero - if there is no active signal from the pilot, the aircraft automatically returns to a neutral flight attitude - in the event of a loss of signal, the aircraft lands automatically - a signal is triggered to the pilot in the event of critical battery capacity
Basic Settings
The receiver is operated via UART to the Tememetry 2 port on the Pxihawk:
SERIAL2_BAUD = 115 SERIAL2_PROTOCOL = 23 RSSI_TYPE = 0 RC_OPTIONS = 2848 (Use passthrough for CRSF telemetry / Suppress CRFS mode/rate messages for ELRS System)
I would like to use switch 5 on the remote control to arm the flight controller, therefore the default setting for the arming witch must be changed from 8 to 5. In addition, the command for arming must be set to RC5 (153 = arming)
FLTMODE_CH = 8 RC5_OPTIONS = 153
The next step is to ensure that the flight controller can be operated without GPS and compass:
FS_GPS_ENABLE = 0 COMPASS_ENABLE = 0
Safety Measures
Currently in progress.